重庆邮电大学光电工程学院 / 重庆国际半导体学院 重庆南岸 400000
摘 要:本实验作品以TI公司出品的MSP430F5529单片机作为控制核心,采用电容式传感芯片FDC2214为核心器件来实现手势接近和识别的功能,完成对猜拳游戏和划拳游戏的判别。通过USART HMI 触摸屏操控单片机调整游戏模式,并进行相应模式下的游戏过程,结果直接由USART HMI 触摸屏显示。
整个系统的电路结构简单明了,可靠性能高,稳定性强,多次实验测试结果稳定可靠。
关键词:MSP430F5529, FDC2214 EVM模块, USART HMI 触摸屏,手势识别。
1方案选择与论证
1.1主控芯片方案选择
方案一:采用STM32F103单片机,高性能,拥有较多I/O口,使用相对复杂,操作较难,此单片机功耗高,I/O口浪费较为严重。
方案二:采用MSP430F5529,性能较高,功耗更低,且运行速度快,操作相对较简单且能够充分利用本单片机资源。
综合分析,方案二充分利用资源,节约能耗,可行性更高,更加符合条件。
1.2识别传感器的选择
方案一:采用红外感应技术的人体接近感应器,非接触式,灵敏度高,测量范围大,但其无法对手势进行具体识别。
方案二:采用TI公司自主研发的电容传感FDC2214 EVM模块,低功耗、低成本且高分辨率的非接触式感测技术,适用于从接近检测和手势识别应用。
综合分析,选择方案二简单易行,符合要求,所以采用方案二。
1.3传感平面材料的选择
方案一:通过漆包线的多次环绕,制作成一个漆包线传感平面,需使用较多漆包线,且制作一个标准传感平面难度较大,操作复杂。
方案二:采用双面覆铜PCB板,简单裁剪之后即可作为一个传感平面,且该平面平整光滑,较为标准,传感性能更好。
综合分析,选择覆铜PCB板作为传感平面能更有效地产生电容变化,组合操作简单,所以采用方案二。
1.4显示屏器件的选择
方案一:采用LCD12864,程序简单,操作方便,但由于其屏幕分辨率低,且显示区域有限,显示图案与数据模糊,不能够直观显示本次实验结果。
方案二:采用USART HMI 触摸屏,屏幕较大,能够充分显示实验过程及结果,16位彩色RGB显示,支持图片格式,以及串口下载,SD卡下载两种方式,方便了界面的设计与调试过程。
综合分析,采用方案二更加直观便捷,所以采用方案二。
1.5通道路数选择
方案一:采用FDC2214 EVM模块单通道连接电容感应板,此方法程序要求简单,且电容板制作方便,但精度不高,且受外界干扰强。
方案二:采用FDC2214 EVM模块双通道连接电容感应板,程序书写比较方案一由些许难度提示,但由于双通道补偿,精度会有所提升。
方案三:采用FDC2214 EVM模块四通道同时采样,程序书写相当复杂。
综合分析,方案二更为合理。
1.6外接干扰排除
方案一:在电容感应板外侧增加金属球壳,进行电磁波信号屏蔽。
方案二:给感应PCB板喷漆,防止因氧化导致测试精度降低。
方案三:在感应板上下增加亚克力板,降低湿度和温度的影响。
综合分析,金属球壳屏蔽运输和操作难度较大,因此采用方案二和方案三。
1.7整体方案设计
本次设计任务是通过TI公司生产的高分辨率、高速、多通道电容数字转换器FDC2214 EVM模块作为手势识别传感器,利用FDC2214 EVM模块双通道实现手势接近和识别的功能,利用覆铜PCB板作为传感平面,根据电容值计算公式C=εr*S/4πkd,当人手接近该导体传感平面时,传感端的电容发生了变化,这就会导致LC电路振荡频率的变化,从而反映出手势接近,以及手势的判定。在规定的两种工作模式下,进行相应的游戏过程,并且实时将游戏结果显示到触摸屏上。为了完成上述功能,将整个装置系统设计为四个基本模块,电源供能模块,信号采集与检测识别模块,数据分析与处理模块,实时显示模块。
2 理论分析与计算
2.1传感器组成方案与工作原理分析
TI公司的新型电容-数字转换器(FDC)基于LC谐振器传感器。电容式传感是一种低功耗、低成本且高分辨率的非接触式感测技术,适用于从接近检测和手势识别到远程液位感测领域的各项应用。电容式传感系统中的传感器可以采用任意金属或导体,因此可实现高度灵活的低成本系统设计。电感器和电容器连接到每个通道的两个输入端。一个导电的传感器板,例如铜,可以连接到LC槽的任何一个节点作为电容传感器。在有源模式下,设备在LC槽上激发半正弦波并测量其振荡频率。人手靠近传感器板时,会引起系统电容的变化,即可以测量的频率的变化,从而通过对频率数值的采样进行分析并传给触摸显示屏,显示相应的现象。
2.2数据采样与处理算法
MSP430F5529测量出频率的变化,并将得到的频率数值通过串口导出,再利用MATLAB软件对导出的数值进行数据分析与整合,多次重复上述操作,得到足够多组数据后拟合出相应折线图直观地展现每次测试的手势不同而得到的数值结果范围变化,通过USART HMI 触摸屏操作,利用各种手势的频率变化范围设定USART HMI 触摸屏显示相应的游戏结果。
3电路与程序设计
该系统主要采用FDC 2214 EVM电路图和MSP430F5529 原理图。
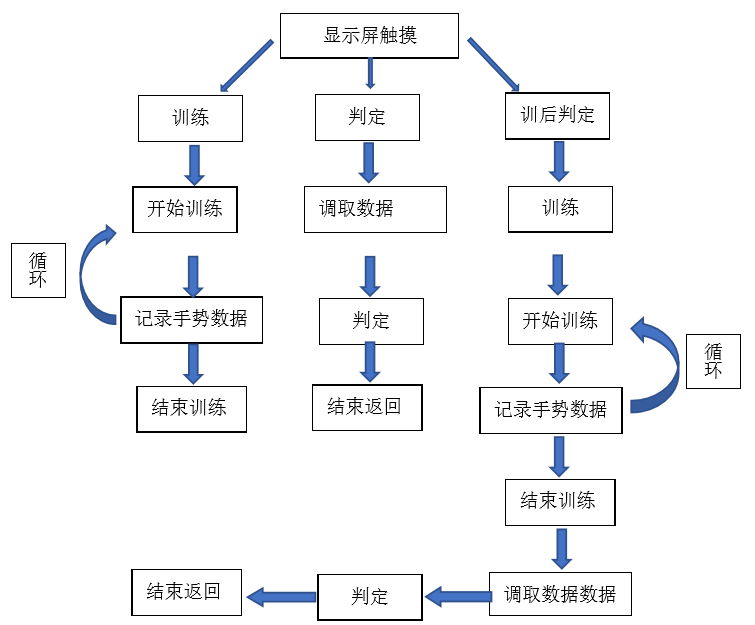
程序设计图(程序可循环运行):
4测试方案与结果
4.1测试仪器
电源RIGOL DP832*1
万用表RIGOL 3058*1
4.2测试方案及结果
制作由自带电源供电,首先测试判别模式。选取一名指定人员进行猜拳训练后进行判决游戏,将手掌放置于传感器平面,手势依次变换,并且显示屏在小于1秒的时间内也依次显示剪刀,石头,布,三种游戏结果图案。指定人员再随机变换手势,显示屏在小于1秒的时间内显示出相应游戏结果图案。指定人员进行划拳游戏,将手掌放置于传感器平面,手势依次变换为1,2,3,4,5,显示屏在小于1秒的时间内也依次显示1,2,3,4,5,五种游戏结果图案。指定人员随机变换手势,显示屏在1秒之内显示出相应游戏结果图案。
之后进行训练模式,随机选取周围一名人员进行测试。测试人员将手放置于传感平面,手势依次录入为剪刀,石头,布,且每种手势仅训练一次,再切换到训练后判别模式,对测试人员进行猜拳判定,显示屏1秒之内显示相应游戏结果。
测试人员手势训练依次为1,2,3,4,5,每种手势录入一次,再切换到训练判别模式,对测试人员进行划拳判定,显示屏在1秒之内显示相应游戏结果,至此,整个测试过程结束。
参考文献
[1]TI公司出品FDC2214 EVM官方数据表
http://www.ti.com.cn/cn/lit/ug/snou138a/snou138a.pdf
[2]TI公司出品FDC2214官方数据表
http://www.ti.com.cn/cn/lit/ds/symlink/fdc2214.pdf
[3] 赵燕,传感器原理及应用,北京大学出版社,2010年版
[4] 仁保宏,胡大可, MSP430系列超低功耗16位单片机原理与应用, 北京航空航天大学出版社,2000年版

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



