广州擎天实业有限公司 广州 510300
摘要:本文主要介绍一种总线协议在大功率铝型材行业电源数字控制系统中的应用。期望在铝型材行业发展越来越好的今天,能够将一些新的技术,可靠的通讯方式引入到大功率电源的制造中来,从而推动产品的升级,更好的服务于铝型材等相关行业。
关键词:总线协议;数字控制系统;大功率电源;
The application of a bus protocol in power supply of high-power aluminum profile industry
XU Changlei,ZHAO Shengjun,WU Wei,HUANG Huaqiang
(GuangZhou Kinte industrial Co.,LTD,GuangZhou 510300,China)
Abstract: This paper mainly introduces a bus protocol in power supply digital control system of high-power aluminum profile industry. Nowadays, the aluminum industry is developing better and better. We expect to introduce some new technologies and reliable communication methods into the manufacturing of high-power power supplies, so as to promote the upgrading of products and better serve the aluminum and other related industries.
Key words: Bus protocol; digital control system; High power supply;
近年来,随着国家节能口号的提出,节能这一目标,逐渐被各大行业所重视,节能项目的研究方兴未艾。在工业用电源领域,尤其突出的便是大功率高频电源的研制。与传统电源相比,大功率高频电源效率高、能耗低、体积小,更受工业生产厂家的喜爱。但对于大功率高频电源应用的场合,往往现场干扰信号多而且强,而且对于设备内部的通信质量要求很高。所以一套成熟可靠的控制系统,往往是其性能优劣的关键,而控制系统所采用的通讯协议的优劣,又很大程度上决定了能否较少系统总线上的数据传输量,从而有效的降低干扰信号的影响,并且提高设备通讯的质量。本文重点介绍CAN总线协议在工业控制系统中的合理应用。
1 CAN总线协议简介
CAN总线的全称是Controller Area Network,即控制器局域网总线,属于现场总线的范畴。这种总线协议最初是由德国的博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。但是由于这种总线协议的优越性,近年来它也越来越多的应用到其它行业,比如安全防护、航空业和工业控制领域。
它的优越性主要体现在以下几个方面:
第一、高灵活性
CAN总线为多主机方式工作,网络上任意一个节点可以在任意时刻主动的向网络上的其它节点发送信息,而且不分主从。也有鉴于此,整个网络的通讯架构可以做成点对点、一点对多点和全网广播等几种通讯模式,非常灵活。
第二、高实时性
CAN总线协议在通讯距离为30M以内时,可以提供高达1MB/S的通讯速率,即是通讯距离达到了10Km, CAN仍可提供高达50kbit/s的数据传输速率。可以很好地满足工业现场的实时性。
第三、高可靠性
CAN总线协议的每帧信息都带有CRC校验和其它检错措施,数据传输出错率极低。并且CAN网络上的节点在错误严重的情况下,具有自动关闭总线的功能,切断与其它节点的联系,从而不会影响到总线上的其它操作。
2 CAN协议应用的场合
CAN总线协议可以应用到多种电源产品的控制系统当中,从大型氯碱化工产品的控制系统到常规氧化用高频电源的控制系统,再到非常规/大功率高频电源的控制系统,这些控制系统往往以ARM、FPGA、PowerPC和DSP等多种控制芯片的组合为核心,CAN 总线通讯协议便能很好的和此类芯片配合,组建成良好的控制系统。这也正是目前工业控制领域嵌入式操作系统的主流和前瞻方向。
本文所论述的重点,便是CAN总线通讯协议在以DSP芯片为核心的控制系统中的应用。目前这一控制系统,主要应用在铝型材行业大功率高频开关电源中。
3 CAN总线上的三种通讯模式
高频电源控制系统中的CAN总线网络架构如下:
图1 CAN总线网络架构图
从图1可以看出,整个控制系统分为三个部分,其中通讯板负责将整机系统的各种状态数据、故障数据和整流数据上传,以及将通过PC机和HMI(人机界面)设定的运行参数、命令参数和保护参数等数据下传到各分布式控制板和I/O板;而以ARM芯片为核心的分布式I/O板则主要负责整个控制系统中数字量、模拟量的采集以及特定逻辑继电器点的输出;以DSP芯片为核心的控制板则主要负责高频开关电源各模块的具体整流控制以及各模块之间的整体配合。鉴于此种网络架构,通常主要采用三种通讯模式:
(1) 数据信息实时全网广播
在这种通讯模式中,每块板无论自己板内的数据是否发生变化,都要定时将数据发送到CAN总线上进行全网广播,其余每块板都要对此广播信息做出反应。很明显,此种通讯模式可以较好的保证系统的实时性和准确性,不会造成某些数据的丢失,可以保证系统的参数和命令等能够确切的传达到需要接收的模块。但是这种通讯模式的局限性也很明显,即对于数据传输较多的控制系统,这种通讯模式容易造成CAN网络的数据竞争,也会造成控制芯片要花费大量的时间和资源去处理其余各个模块传输过来的数据。总体来说,这种通讯模式适合电路板较少且通讯数据较少的控制系统。
(2) 数据信息发生变化时全网广播,各模块增加应答机制
在这种通讯模式中,每块板只有自己的数据发生变化时,才会将数据发送到CAN总线上进行全网广播。虽然其余每个模块依然要对该信息做出反应,但是发送数据的模块在接收到该信息应该到达模块的回应之后,便会终止该数据的发送。
(3) 数据信息变化时进行点对点和一点对多点的通讯,各模块增加应答机制
在这种通讯模式中,每块板只有自己的数据发生变化时才会发送到CAN总线,而且采用点对点传输和一点对多点的传输,即数据只在模块的发送端和必要的一个(或几个)数据接收端之间传输。由于模块采用了硬件帧ID的方式进行过滤,所以与传送的信息无关的其它模块,就没有必要再对该信息做出反应。同样的,由于采用了应答机制,发送数据的模块在接收到该信息应该到达模块的回应之后,也会终止该数据的发送。
4 针对不同通讯模式的数据测试和结论分析
4.1 测试数据
针对CAN总线上不同的通讯模式,测得的实验数据如下:
表1 (1)通讯模式所对应的测试数据
CAN通讯模式:数据不断发送,模块接收所有板的数据进中断 | ||||
时间 | 10Min | 30Min | 1Hour | 数据量过10W |
通讯量 | 65452 | 185405 | 359450 | — |
进入中断次数 | 61390 | 165416 | 318632 | — |
出错量 | 1088 | 3047 | 6170 | — |
出错率 | 16.6‰ | 16.4‰ | 17.1‰ | — |
表2 (2)通讯模式所对应的测试数据
CAN通讯模式:数据变化才发送,且增加应答机制,模块接收所有板的数据进中断 | ||||
时间 | 10Min | 30Min | 1Hour | 数据量过10W |
通讯量 | 2700 | 7374 | 14841 | 100190 |
进入中断次数 | 2470 | 6401 | 12870 | — |
出错量 | 0 | 0 | 0 | 16 |
出错率 | 0 | 0 | 0 | 0.16‰ |
表3 (3)通讯模式所对应的测试数据
CAN通讯模式:数据变化才发送,且增加应答机制,增加硬件帧ID过滤,模块接收固定板的数据进中断 | |||||
时间 | 10Min | 30Min | 1Hour | 数据量过10W | 加测 |
通讯量 | 3664 | 11338 | 22997 | 100179 | 604857 |
进入中断次数 | 156 | 457 | 916 | 3973 | — |
出错量 | 0 | 0 | 0 | 0 | 0 |
出错率 | 0 | 0 | 0 | 0 | 0 |
说明:①所有数据是在整个控制系统模拟现场正常开机的情况下测得;
②通讯量和出错量的测定,采用的是立富L的 Kvaser CAN分析仪测定
③所有的中断量测定,以DSP模块程序内部进入CAN中断次数为准。
4.2 数据分析
4.2.1对于CAN总线上数据通讯量的影响:
4.2.1.1 (1)通讯模式和(2)通讯模式对数据通讯量的影响
对比表1和表2,从两个表中的数据可以计算出CAN总线上通讯的数据量减少的倍数。
10Min时:65452/2700 = 24.2;
30Min时:185405/7374 = 25.1;
1Hour时:359450/14841 = 24.2;
可以得出:由于采用了应答机制,且每块板的数据只有发生变化时才发送,这样就大大减少了CAN总线上故障类数据、状态类数据、命令类数据和设定值类数据的发送。而每块板只是保留了电压、电流以及IGBT温度这类数值经常变化的数据的发送。从实验数据上来看,通讯数据量直接减少了二十多倍。
4.2.1.2 (2)通讯模式和(3)通讯模式对数据通讯量的影响
对比表2和表3,从两个表中的数据可以看出,在采用了硬件帧ID过滤之后,相应时间内的相应通讯数据量反而略微增加了,这是什么原因呢?这个并不是由于采用硬件帧ID造成的,而是因为:表2所测数据依靠的系统的额定电压是15V,因为整机的电压偏低,当DSP板上实际进入的模拟电压有些微变化时,整机电压值并不会有明显改变,所以电压这个数据量基本不往CAN网络上发送;但是对于表3 ,所依靠系统的额定电压为750V,当DSP板上实际进入的模拟电压有些微变化时,整机电压值就会有明显改变,所以电压这个数据量要实时往CAN网络上发送。这一点可以通过对报文的分析获得(电压对应的地址为:D0位为20、D3位为77),两个表所对应的报文如下:
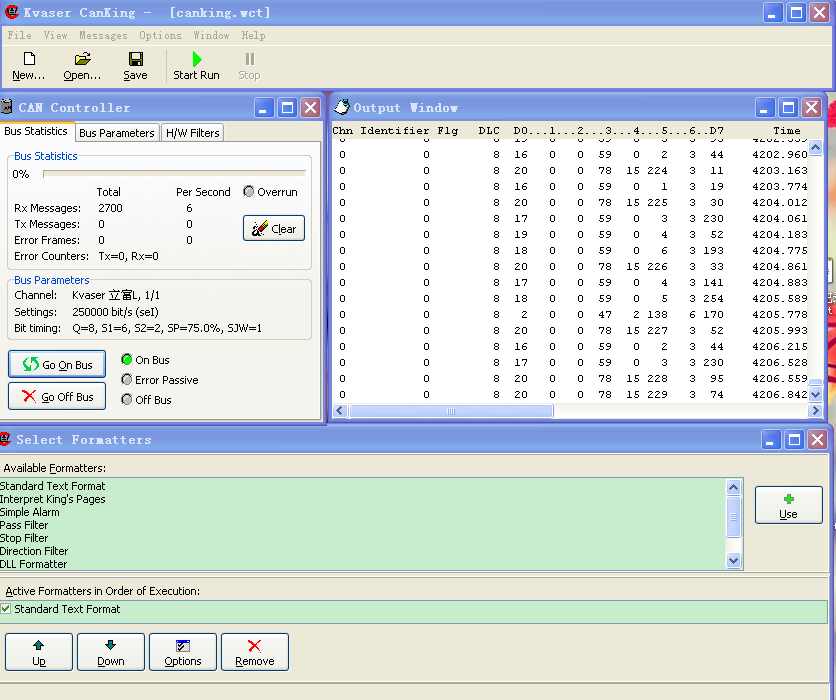
图2 表2对应的CAN报文
能明显看出,上图报文没有D0位为20、D3位为77的数据发出。

图3 表3对应的CAN报文
可以明显看出,上图报文中明显增加了很多有D0位为20、D3位为77的数据。
可以得出:硬件帧ID的采用,并不会减少发往CAN总线上的数据。
4.2.1.3 (1)通讯模式和(3)通讯模式对数据通讯量的影响
对比表1和表3,从表中的数据可以计算出,即使表3所依靠的系统的电压值会频繁的发到CAN网上,在这种情况下,CAN总线上的数据量依然减小了很多倍:
10Min时:65452/3664 = 17.9;
30Min时:185405/11338 = 16.4;
1Hour时:359450/22997 = 15.6;
可以得出:采用应答机制,且每块板的数据只有发生变化才发送时,确实可以大幅度降低CAN总线上的通讯量,就是后续再增加几个需要不断传送数据的变量,和所有的数据都一直发送这种方式相比,整个CAN总线上的数据量还是会大幅度降低,从数据来看,有十几倍之多。
分析三种不同的通讯模式对CAN总线上数据通讯量的影响得出:
CAN总线通讯模式采用应答机制,且每块板的数据只有发生变化才发送,这种方式可以大幅度降低CAN总线上的通讯量,结合现场的实际情况加以修正,这个降低的倍数有十几倍之多;另外采用硬件帧ID过滤的方法并不会减少或者增多CAN总线上的通讯量。
4.2.2 对于进入DSP模块程序中断数量的影响:
4.2.2.1 (1)通讯模式和(2)通讯模式对程序中断量的影响
对比表1和表2,从两个表中的数据可以计算出进入DSP模块程序中断的次数减少的倍数。
10Min时:61390/2470 = 24.9;
30Min时:165416/6401 = 25.8;
1Hour时:318632/12870 = 24.8;
可以得出:由于(2)总线通讯模式使得CAN总线上的数据通讯量大幅度降低,从而也使得进入模块程序的中断次数相应降低,从数据上看,降低了二十多倍;
4.2.2.2 (2)通讯模式和(3)通讯模式对程序中断量的影响
对比表2和表3,从两个表中的数据可以计算出进入DSP模块程序中断的次数减少的倍数。
10Min时:2470/156 = 15.8;
30Min时:6401/457 = 14;
1Hour时:12870/916 = 14.1;
可以得出:由于CAN采用了硬件帧ID的过滤,在没有减少CAN总线上总的通讯数据量的情况下,使得DSP模块程序进入中断的次数大大降低,从数据上来看,有十几倍之多(此时模块只接收MAC通讯板的数据和分布式IO的输入点数据,而一般情况,只要不发生外接硬件故障点,分布式I板的数据就不发生变化,也就无需把数据发往CAN总线,而正常开机状态下,MAC通讯板只是往CAN总线上发送大闭环调节的电流数据)。
4.2.2.3 (1)通讯模式和(3)通讯模式对程序中断量的影响
对比表1和表3,从两个表中的数据可以计算出进入模块程序中断的次数减少的倍数。
10Min时:61390/156 = 393.5;
30Min时:165416/457 = 362;
1Hour时:318632/916 = 347.9;
可以得出:与(1)总线通讯模式相比,(3)总线通讯模式由于采用了应答机制、数据变化时才允许发送以及硬件帧ID的过滤,这些措施使得进入模块的中断次数降低了几百倍之多。从数据上来看,有三百多倍。
分析三种不同的通讯模式对DSP模块程序进入中断数量的影响得出:
明显可以看出(3)总线通讯模式的优越性,与前两种CAN的通讯模式相比,DSP模块程序进入中断的次数依次降低了三百多倍和十几倍。
这对于DSP程序的高频采样、高频脉冲的输出和整个DSP程序的流畅运行,起到了异常关键的作用。
4.2.3对于CAN网络上数据通讯错误率的影响:
4.2.3.1 (1)通讯模式和(2)通讯模式对通讯错误率的影响
对比表1和表2,从两个表中的数据可以明显看出:(1)总线通讯模式,通讯错误率高达16‰还要多;但是CAN的(2)总线通讯模式已经可以将错误率降低到0.16‰,只是在数据量测到十万多个的时候才出现了16个错误量;其改善的倍数可以计算:16‰/0.16‰ = 100;
可以得出:由于CAN的(2)总线通讯模式使得CAN网上的数据通讯量大幅度减少,使得由于CAN网上数据发送竞争等原因引起的数据错误率直线下降100倍。
4.2.3.2 (2)通讯模式和(3)通讯模式对通讯错误率的影响
对比表2和表3,从两个表中的数据可以看出:CAN的(2)总线通讯模式还存在错误率,虽然已经降低到了0.16‰;CAN的(3)总线通讯模式经过两天不间断的测试,一直没有发现错误量。虽然测得的数据已经达到了几十万之多,但是通讯稳定,正常,数据没有产生错误。
可以得出:CAN通讯硬件帧ID的采用,从实验数据来看还是会对CAN通讯的质量有明显的提升,经过不间断的测试,数据错误率为0。
4.2.3.3 (1)通讯模式和(3)通讯模式对通讯错误率的影响
对比表1和表3,从两个表中的数据来看,两种CAN通讯模式,一个通讯错误率为16‰,一个为0。对比明显,一个效果相当好,一个相当差!
分析三种不同的通讯模式对CAN总线上数据通讯错误率的影响得出:
CAN的(3)总线通讯模式明显优于前面两种的通讯模式,最直白来说,(3)总线通讯模式使得CAN总线的通讯错误率降到极低极低的水平,数据上来看,错误率为0。
5 屏蔽措施对CAN总线通讯质量的影响
5.1 测试数据
针对CAN总线通讯电缆的屏蔽层是否单端接地,测得的实验数据如下:
表4 (4)CAN总线电缆屏蔽层悬空
时间 | 10Min | 30Min | 1Hour |
通讯量 | 74836 | 196545 | 376944 |
出错量 | 35921 | 94560 | 182179 |
出错率 | 48.0% | 48.1% | 48.3% |
表5 (5)CAN总线电缆屏蔽层单端接地
时间 | 10Min | 30Min | 1Hour |
通讯量 | 66908 | 189864 | 366571 |
出错量 | 1134 | 3152 | 6237 |
出错率 | 16.9‰ | 16.6‰ | 17.0‰ |
说明:①所有数据是在整个控制系统模拟现场正常开机的情况下测得;
②通讯量和出错量的测定,采用的是立富L的 Kvaser CAN分析仪测定。
5.2 数据分析
表4中的数据,当CAN总线的电缆屏蔽层没有任何一端接地,处于浮空状态的时候,可以看出通讯数据的出错率是非常之高的,达到了48%以上。实际上在这个时候,已经处在经常丢包的状态了,整个CAN通讯网络数据的上传下达非常不顺畅。设备的实际输出电流和每个模块的PWM输出占空比经常得不到更新,升降电流的指令也已经不能正常的下达到每个模块,需要重复操作多次,才能偶尔有一次的指令得到执行。事实上设备已经濒临失控的状态。对于正常的设备使用来说,这种情况当然不能接受!
表5中的数据,当CAN总线电缆的屏蔽层进行单端接地了之后,整个CAN通讯网络的通讯质量得到了明显的改善,通讯数据出错率由48%的量级直接降到了16‰,整整改善了30倍有余。此时设备的数据上传下达通畅,设备的指令可以得到迅速的执行和回馈,这种情况才是现场客户能够接受的。
对比表4和表5的数据可知,在CAN总线协议的应用中,尤其是对于高频开关电源,设备的干扰性很大,此时尤其要注意做好通讯的抗干扰措施。CAN总线电缆的单端接地,可以明显的改善设备的通讯质量。
6 CAN总线协议在高频开关电源中的正确用法
由于高频开关电源的整流器件多为IGBT和MOSFET,其耐高电压高电流的特性要远远低于晶闸管,这就要求其过流过压的保护时间要足够快,即控制系统的故障保护时间要控制在1ms以内。也就是说系统的控制芯片要用大量的资源来处理这一过程,同时还要保证IGBT的PWM触发脉冲列正确无误。这就要求,在保证控制系统正常工作的前提下,芯片其余的功能要尽可能少的占用芯片的资源,这其中,据实践看来,一个是要保证设备通讯的抗干扰性要强,数据的上传下达要通畅;还有主要就包括要减少CAN总线上的通讯数据量,减少DSP芯片进入CAN中断的次数,从而为芯片的过流保护和正常PWM的输出留出时间。
结合上述实验数据和结论分析,在设计以CAN总线作为内部通讯协议的高频开关电源控制系统时,对于总线数据传输这一块,首先应当采用带屏蔽层的通讯电缆,且通讯电缆的屏蔽层一定要单端接地;再有应当采用应答机制;并且对于分布式控制系统的各个模块,应当是该模块的数据发生变化时才允许发送;并且各模块应当尽可能采用硬件帧ID的过滤方式。这样做一是极大的降低了CAN总线上的通讯数据量,从实验数据来看,与不采用这三种措施的CAN网相比,数据量降低十几倍;二是极大地降低每个控制模块中程序的进入中断次数,从实验数据来看,与不采用这三种措施的CAN通讯模式相比,数据量降低三百多倍。而这一点对于保证DSP程序所需的高频采样、高频脉冲的输出和整个DSP程序的流畅运行,起到了异常关键的作用。三是极大地降低了CAN网络通讯的错误率。而这三点,亦可以明显降低现场干扰信号对于通讯的干扰,对于保证整个控制系统安全、可靠、稳定、流畅的运行起到了至关重要的作用!
7结语
本文简要介绍了CAN总线协议的优势,重点介绍了CAN总线协议几种通讯模式在高频开关电源控制系统中应用,给出实际测得的CAN通讯质量的相关数据,进行分析比较,并给出最优的解决方案。并且也提出了通讯电缆屏蔽层单端接地对于通讯质量的影响。希望能够有效指导后续高频开关电源用控制系统的开发。我们也期待能和大家共同讨论,共同进步,使得CAN总线协议能够在各种工业控制系统中得到良好的应用。
参考文献:
[1] 刘玲顺,高艳丽,张树团,王昉.TMS320F28335 DSP原理及开发编程[M].北京:北京航空航天大学出版社,2011.12
[2]Abraham I. Pressman Keith Billings Taylor Morey著;王志强等译.开关电源设计(第三版)[M].北京:电子工业出版社,2010.6:311-318
8

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



