国防科技大学空天科学学院空天工程系, 湖南 长沙 410000
摘要:针对超音速空中靶标在飞行过程中呈现出强耦合、非线性、欠驱动的特点,以及传统的基于线性系统理论设计的安全控制器在进行安全控制时容易出现超出舵机机械特性极限,自毁成功率低等特性。为了提升空中靶标安全控制系统的可靠性,将模糊控制和双环滑模结合应用,能够在满足舵机等操纵装置机械特性的前提下,确保快速自毁,同时减缓了单独采取滑模控制容易产生的抖震现象。
关键词:超音速 滑模控制 模糊控制 安全控制
1、引言
空中靶标是用来模拟来袭导弹或者飞机,考核或验证防空武器系统效能的常用靶标[1]。空中靶标一般用退役的空舰、飞航导弹重新改装,因而其飞行控制性能的可靠性存在降低的可能,飞行试验过程中容易出现风险。以往的武器试验主要采用亚音速类靶标,其安全控制可靠性较高,但对于当前正在开始应用和逐步发展的超音速类靶标,由于飞行过程中的非线性,特别是在靶弹自毁阶段呈现出的欠驱动、强耦合特点,适用于亚音速靶标传统的线性控制系统难以满足自毁要求。当前,在飞行控制领域出现许多算法[2]-[6],比如PID控制、滑模控制、强化学习等。为提升靶弹供靶可靠性,确保飞行试验安全,本文提出了主通道与辅助通道联合的冗余判别体系,并且基于模糊控制与双环滑模控制对独立于靶弹飞行控制系统的靶弹安全控制系统进行了优化设计。该方法利用了双环滑模控制系统抗干扰性强、鲁棒性强的特点,增强了安控系统在入水自毁阶段的抗干扰性能,而且双环滑模与模糊控制相结合,能够充分应用以往飞行试验的经验来逼近所需未知量,同时减少滑模控制容易导致出现的抖震现象。
2、靶弹飞行动力学模型
本文以俄罗斯海军某款超音速导弹的主要性能数据作为模型构建参考,导弹为陆地发射,发动机采用的是煤油燃料的冲压发动机,弹体结构为轴对称,偏航通道与俯仰通道的气动特性一致。导弹的主要性能指标为初始质量为1600kg,长9m,直径0.71m,航空煤油质量为500kg,射程120-300km,最大飞行速度为3马赫。
空中靶标在进入安全控制过程中受力主要由受地球引力而体现出的重力G以及气动力R组成,气动力在速度坐标系上可以分解为阻力X、升力Y、侧力Z,并与来流动压头q大小以和靶标特征面积S成正比,在速度坐标系中公式如下:

空气力矩在弹体坐标系下公式如下

弹道坐标系下的空中靶标质心动力学方程为
空中靶标质心运动学方程
空中靶标绕质心转动的运动学方程
除此之外的坐标系欧拉角转换以及文章中字母含义参考文献[7]
3、滑模控制器
对于超音速空中靶标运动,由飞行特性可以知道,可以分为位置运动和角度运动,其中角度运动变化较快为快速变化的内环,位置运动变化较慢为慢速变化的外环,对于内环角度滑模设计,计划采取积分滑模控制用于消除在外界扰动情况下产生的稳态误差,对于外环位置滑模设计充分利用以往飞行数据经验,采取模糊控制方法与滑模控制相结合进行设计。
首先是内环角度滑模面控制设计:

其中
 代表攻角
代表攻角 、侧滑角
、侧滑角 、滚转角
、滚转角 。其中
。其中 为给定的控制程序角,
为给定的控制程序角, 为给定控制程序角和当前角度的误差
为给定控制程序角和当前角度的误差
观察攻角、侧滑角、滚转角与等效舵偏角的关系,将靶弹状态空间方程转换为以下模式
其中, ,
, ,增益矩阵
,增益矩阵
设计如下的滑模函数

其中L、M、N均大于0,满足Hurwitz条件。

由于需要空中靶标更加快速的改变姿态,内环滑模面收敛速度更快,单纯采取指数趋近律会出现抖震现象,为此结合指数趋近律快速趋近的优点和幂次趋近律稳定趋近的优点,设计PID趋近律,此时趋近律在初期能够快速推动状态变量向原点,但是当接近滑模面时,该趋近律速度能够很快减小,能够减小穿越滑模面时的幅度,解决了变结构当中固有的抖震问题。
设计出的PID趋近律:

其中 为比例系数;
为比例系数; 为积分系数;
为积分系数; 为微分系数,为了加快趋近速度,将比例项
为微分系数,为了加快趋近速度,将比例项 加入常数
加入常数 来修正,
来修正, 是运动点第一次达到滑模面的时刻,
是运动点第一次达到滑模面的时刻, 是当前时刻,积分项是为了控制抖振的幅度。
是当前时刻,积分项是为了控制抖振的幅度。
因此可以得到基于趋近律的滑模控制器
下面证明所设计的趋近器能够在限定的时间的达到切换面,切保持稳定
取Lyapunov函数

为了满足Lyapunov稳定性,需要

经验证,所设计的滑模面符合上述条件是渐进稳定的。
下面是外环控制器设计:
其余的滑模控制函数以及趋近律结构与内环滑模控制器一致,经验证均满足渐进稳定条件。
滑模函数为

设计的PID趋近律如下:

对于PID趋近律中的 ,设计一个二维模糊控制,系统输入变量为
,设计一个二维模糊控制,系统输入变量为 与
与 ,当 变大, 也较大时, 变小;当 变小, 也较小时, 变大。 与 的隶属度函数为高斯型,论域为
,当 变大, 也较大时, 变小;当 变小, 也较小时, 变大。 与 的隶属度函数为高斯型,论域为 , 的隶属度函数为三角形,论域为
, 的隶属度函数为三角形,论域为
 ,相关的模糊控制规则设定主要基于飞行试验统计经验。
,相关的模糊控制规则设定主要基于飞行试验统计经验。
设定模糊控制规则:
输出变量 | 输入变量 | |||||||
NB | NM | NS | Z | PS | PM | PB | ||
输 入 变 量
| NB | NB | NM | NS | NB | PS | PM | PB |
NM | NM | NM | NM | NM | PM | PM | PM | |
NS | NS | NS | NB | NS | PS | PM | PB | |
Z | NB | NS | NS | Z | PB | PM | PS | |
PS | PS | PM | PB | PB | NB | NM | NS | |
PM | PM | PM | PM | PM | NM | NM | NM | |
PB | PB | PM | PM | PS | NS | NM | NB | |
NB表示为负大,NM表示为负中,NS表示为负小,Z表示为零,PS表示为正小,PM表示为正中,PB表示为正大。通过两个输入变量组合可以得出输出变量结果。
5、仿真结果与分析
为了能够验证模型的可行性,主要针对三通道角度跟踪理想角度的情况进行仿真分析,假设在飞行过程中,空中靶标以620m/s的速度沿着海平面进行500米的平飞机动,此时空中靶标已经进入安全警戒区,但此时通过给正在飞行的飞行棋传输改变飞行轨迹的命令,方便空中靶标按照最合适的程序角入水自毁或者改变航向。同时在仿真过程中为了能够验证系统的抗干扰性,在偏航通道和俯仰通道分别加入阶跃干扰和正弦干扰进行仿真。
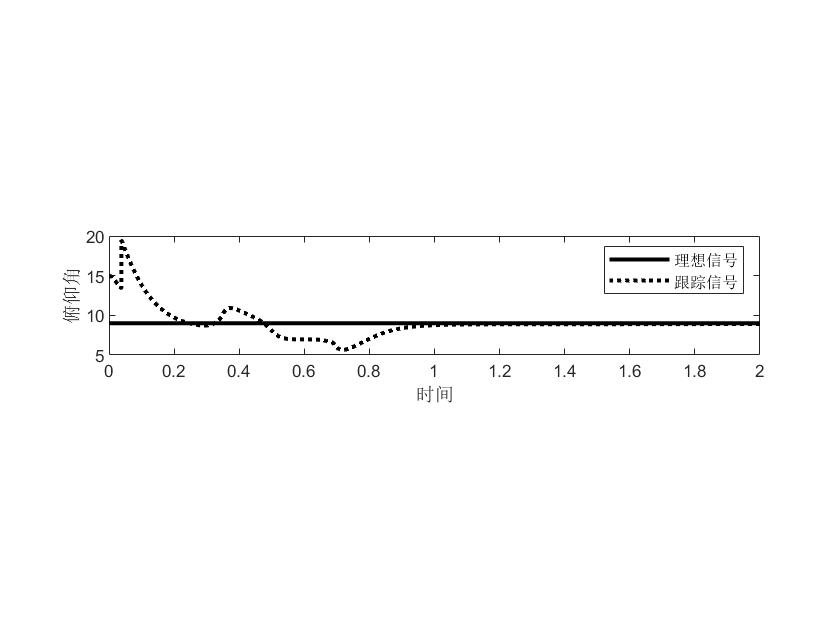
图5 俯仰角变化曲线
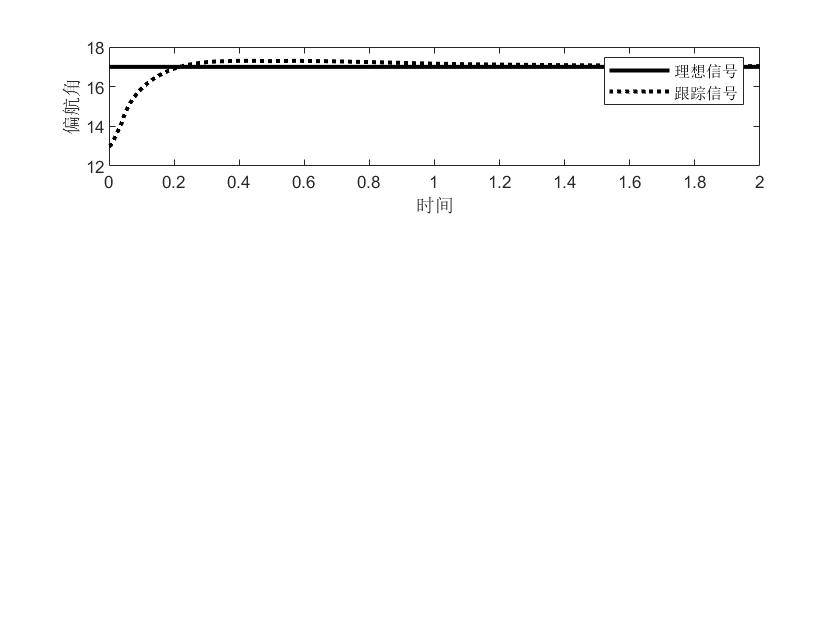
图6偏航角变化曲线
图5为受到正弦干扰后的俯仰角变化曲线,图6为受到阶跃干扰后的偏航角变化曲线,从图中可以看出,当受到正弦干扰后俯仰角跟踪受到了一定的震荡,但是也在较快速度后稳定在跟踪角度上,能够满足控制方面的要求,当受到阶跃干扰后,偏航通道跟踪速度比较快,在0.4s后便能稳定在跟踪角度附近;两个通道的等效舵偏角起初都存在着一定震荡,但是没有出现比较高频的抖震。
综上所述,总体的设计偏向工程实践,双环滑模与模糊控制相结合,能够充分应用以往飞行试验的经验来逼近所需未知量,同时减少滑模控制容易导致出现的抖震现象;同时相关的冗余设计思想可以在进一步的研究中深入分析。
参考文献:
[1]王朝政,朴忠杰,李磊,高婷.基于遗传算法的靶弹爬升段弹道优化设计 [J/OL].战术导弹技术.
[2]GAO Z W,LIU X X,CHEN Z Q M. Unknown input observer based robust fault estimation for systems corrupted by partially decoupled disturbances[J].IEEE Trans on Industrial
Electronics,2016,63(4):2537-2547
[3]方洋旺,邓天博,符文星.智能制导律研究综述[J].无人系统技术. 2020,3(06):36-42
[4]Gaudet B,Furfaro R,Linares R. Reinforcement learning for angle only intercept guidance of maneuvering targets[J]. Aerospace Science and Technology,2020,99,article ID 105746.
[5]VARMA S A,PARWANA H,KOTHARI M,et al.A pitch controlled impact-angle-constrained guidance law for surface-to-surface missiles: AIAA 2016-2114[R][S.l.]: AIAA,2016.
[6]孙景亮,刘春生.基于自适应动态规划的导弹制导律研究综述[J]. 自动化学报.2017,43(7):1101-1113.
[7]钱杏芳,林瑞雄,赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社,2013.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



