身份证号码: 441423199212253334
[摘 要]伴随工业领域持续进步发展,各项现代化科技手段应用成熟度不断提升,对机械臂实际运动期间能量控制提出更高要求,以B样条为轨迹规划,对于实现机械臂的能量最优化控制来说往往可起到良好辅助作用。鉴于此,本文主要围绕着以B样条为轨迹规划之下机械臂的能量最优化控制开展深入的研究和探讨,期望可以为后续更多技术工作者和研究学者对此类课题的实践研究提供有价值的指导或者参考。
[关键词]机械臂;轨迹规划;B样条;能量;最优控制;
前言:
在现代工业领域当中,机械臂从属重要装置,直接关系着工业企业总体机械化生产运行效率及效果,这就更加决定了对机械臂运动能量实施最优控制的重要性,因而,综合分析以B样条为轨迹规划之下机械臂的能量最优化控制,有着一定的现实意义和价值。
关于B样条的概述
B样条基础函数列式即:Gi,n(t)=![]() ,t
,t![]() [0,1],i=0,1,……,n。n代表B样条具体次数,三次均匀性B样条的基础函数列式即为:G0,3(t)=
[0,1],i=0,1,……,n。n代表B样条具体次数,三次均匀性B样条的基础函数列式即为:G0,3(t)=![]() (-t3+3t2-3t+1)、G1,3(t)=
(-t3+3t2-3t+1)、G1,3(t)=![]() (t3-6t2+4)、G2,3(t)=
(t3-6t2+4)、G2,3(t)=![]() (-3t3+3t2+3t+1)、G3,3(t)=
(-3t3+3t2+3t+1)、G3,3(t)=![]() t3。三次的B样条,其曲线段P0,3(t)即:P0,3(t)=
t3。三次的B样条,其曲线段P0,3(t)即:P0,3(t)=![]() [1 t t2 t3][1、4、1、0;-3、0、3、0;3、-6、3、0;-1、3、-3、1][P0、P1、P2、P3],t
[1 t t2 t3][1、4、1、0;-3、0、3、0;3、-6、3、0;-1、3、-3、1][P0、P1、P2、P3],t![]() [0,1]。P1代表控制点,控制点给定为P1条件下,借助上述列式,便可获取到满足于三次的B样条一系列曲线点,详如图1所示。从中可了解到,若是将所期望轨迹点当成控制点,获取相应轨迹曲线,则轨迹曲线无法通过该控制点。故需把轨迹点当成是型值点,以型值点为基础获取控制点,确保所生成曲线可经过所给定相应轨迹点[1]。
[0,1]。P1代表控制点,控制点给定为P1条件下,借助上述列式,便可获取到满足于三次的B样条一系列曲线点,详如图1所示。从中可了解到,若是将所期望轨迹点当成控制点,获取相应轨迹曲线,则轨迹曲线无法通过该控制点。故需把轨迹点当成是型值点,以型值点为基础获取控制点,确保所生成曲线可经过所给定相应轨迹点[1]。
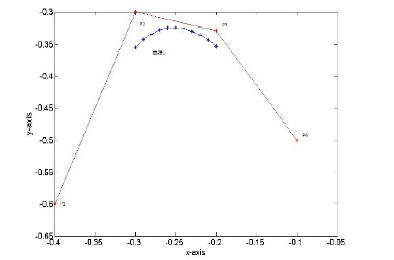
图1 通以控制点为基础所获取曲线点
以B样条为轨迹规划之下机械臂的能量最优化控制
2.1 生成B样条曲线
2.1.1 在单线段式控制点反求层面
针对所给定机械臂的运行能量轨迹点Ti,i![]() (1,……,n),n个轨迹点内含n-1个线段,所有线段都可获取控制点一个,借助该控制点,可获取机械臂运行能量最优的控制轨迹曲线,以重节点为基础条件,获取T(i-1)i线段获取列式即[Pi-1、Pi]=[5,1;1,5][Ti-1,Ti]。对此线段实施控制的4个控制点,即为Pi-1、Pi-1、Pi、Pi,针对单段线段,借助控制点获取线点,往往仅为过轨迹点相应直线插值。针对机械臂来说,已知其所走过历史轨迹,借助障碍物实时传感装置获取局部范围一个或是几个的障碍物相关信息,机械臂将要路过一个或是数个轨迹点得以获取,结合历史运动轨迹点及下个时刻运动轨迹点,则B样条的轨迹曲线便可获取到,为实现机械臂的能量最优化控制奠定基础[2]。
(1,……,n),n个轨迹点内含n-1个线段,所有线段都可获取控制点一个,借助该控制点,可获取机械臂运行能量最优的控制轨迹曲线,以重节点为基础条件,获取T(i-1)i线段获取列式即[Pi-1、Pi]=[5,1;1,5][Ti-1,Ti]。对此线段实施控制的4个控制点,即为Pi-1、Pi-1、Pi、Pi,针对单段线段,借助控制点获取线点,往往仅为过轨迹点相应直线插值。针对机械臂来说,已知其所走过历史轨迹,借助障碍物实时传感装置获取局部范围一个或是几个的障碍物相关信息,机械臂将要路过一个或是数个轨迹点得以获取,结合历史运动轨迹点及下个时刻运动轨迹点,则B样条的轨迹曲线便可获取到,为实现机械臂的能量最优化控制奠定基础[2]。
2.1.2 在多线段式控制点反求层面
针对多段线段式控制点反求列式,需对n个点所组成n-1个的线段,便可列出n-2个的独立端点基础条件列式,Pi=Ti-1+4Ti+Ti+1。假定第i条及第i-1的条线段,其控制点内有三个为重合的,确保第i条及第i-1条的线段二阶有着连续性。为确保方程得以求解,最左端部位线段左端点及最右端处线段右端点,应设重节点基础条件,增设控制点2个,即为P0=P1和Pn+1=Pn,获取矩阵形式所构成方程组,如图2所示。n个控制点解出,增加P0及Pn+1为n+2个的控制点,n+2个的控制点则分别为n-1个的线段相应控制点,其每段曲线均借助4个控制点予以控制,详细情况见图3。以该部分控制点和列式为基础,平滑的一系列曲线即可形成,第i个及第i-1个的线段,因3个控制点呈重叠态势,故该部分曲线呈二阶连续状态,也就是机械臂的运动速度及其加速度可维持于平滑状态,便于以B样条为轨迹规划之下,实现对机械臂的能量最优化控制。
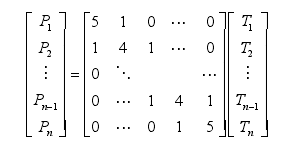
图2 矩阵形式所构成方程组
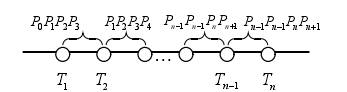
图3 控制点的分配情况示意图
2.1.3 在生成机械臂运动能量最优化控制轨迹层面
已知机械臂实际运行期间所需轨迹点具体情况执行,连续的一条轨迹曲线生成,但一次需读入轨迹点较多,系统生成机械臂一条运动轨迹能量曲线后,则需等待一定的时间,例n=5条件下,每次完成运算后需等待时间间隔为5个,n增大条件下,增加其时间间隔,机械臂运动能量最优化控制轨迹无法得以获取,更加无法实现对于机械臂运动能量最优化控制。对此,以B样条为轨迹规划之下,考虑到机械臂运动能量,存储特定数量运动轨迹点,机械臂每个运动时刻则丢弃上个时刻在存储区内最早的轨迹点,加入新读入机械臂运动轨迹点,如对第si的时刻,存储区内轨迹点假定是Ti,Ti+1,…,Ti+n-1,则借助这些点求获取机械臂运动能量最优化控制点,促使n-1条的轨迹曲线生成,选定其中某条运动轨迹曲线,当成是机械臂第si个时刻相应运动能量控制规划路线,si+1时刻选取的轨迹点则是T
i+1,Ti+2,…,Ti+n-1,Ti+1,Ti+n属于机械臂最后一次读入的运动能量控制轨迹点。处于si+1时刻,n-1条的轨迹曲线得以规划出来,取某条曲线当成是第si+1的时刻所规划路线[3]。以此方法为基础,促使机械臂每读到新运动轨迹点情况下,实时生成全新一条机械臂运动能量的控制轨迹曲线点,将其当成是机械臂运动轨迹的插值点,确保机械臂运动能量最优化、实时化控制轨迹得以生成。
2.2 仿真结果与其分析
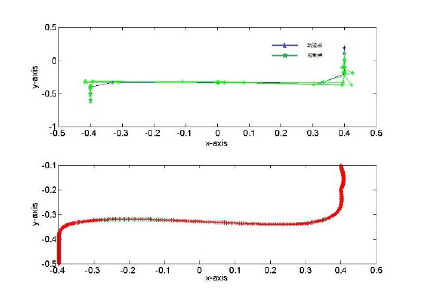
给定轨迹点,以B样条为基础函数及轨迹规划,实现机械臂的能量最优化控制仿真分析。平面上给定轨迹点即为x,y,详见图4。已知其轨迹点条件之下,先借助控制点反求方法获取控制点,对控制点予以合理分段,获取每段曲线相应曲线点,详见图5。速度及其加速度的曲线图则详见图6~7,从中可了解到,若已知晓轨迹点离线规划,则多段内机械臂运动能量控制轨迹曲线速度及其加速度呈连续状态。以B样条为轨迹规划之下,经机械臂运动能量轨迹生成,假定轨迹点仍为表1当中所显示内容,每次仅读入轨迹点5个,且每次选定所生成5端的曲线内部第3段,依照着不同时刻条件,即可拼接成相应曲线,每个时刻均需数据点5个,共规划曲线则是6段,以B样条为基础函数及轨迹规划,实现机械臂的能量最优化控制仿真分析最终结果详见图8~9。机械臂每扫描一个运动能量控制轨迹点,则B样条一段曲线即可获取到,实现对机械臂的能量最优化控制。
图4 平面上给定轨迹点情况
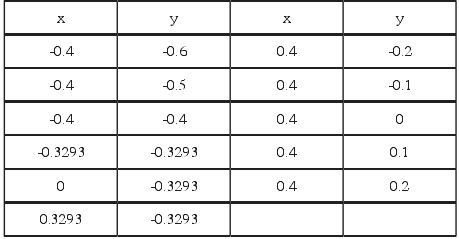
图5 x,y方向加速度总体曲线图
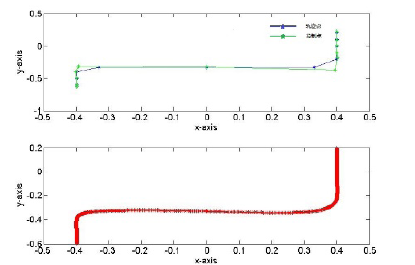
图6 机械臂运动能量最优化控制点和B样条的曲线图
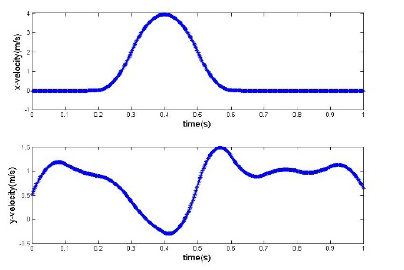
图7机械臂运动x,y方向速度总体能量控制曲线图
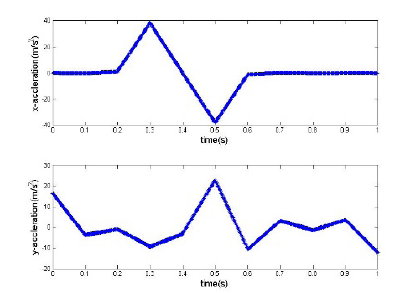
图8 机械臂运动x,y方向加速度总体能量控制曲线图
结语
综上所述,以B样条为轨迹规划之下,对机械臂的能量最优化控制整个实现过程往往极具复杂性,若想今后进一步提升对机械臂的能量最优化控制实施效果,广大技术员们还需增加对此方面更为深入的实践研究,以便于不断优化机械臂的能量最优化控制实施方案,更为显著地发挥B样条的轨迹规划方式方法,实现对机械臂的能量更具高效性的最优控制。
参考文献:
[1] 李虹, 刘松, 孙志毅,等. 基于非均匀B样条曲线的挖掘机最优时间轨迹规划[J]. 中国工程机械学报, 2021, 19(004):511-512.
[2] 韩亚军, 刘家英. 基于B样条曲线的工业机器人运动轨迹误差优化研究[J]. 中国工程机械学报, 2020, 18(003):617-618.
[3] 王晓明, 宋吉, 郑继新,等. 改进B样条曲线的机器人轨迹拟合研究[J]. 传感器与微系统, 2021,34(009):327-328.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



