陆军装备部驻重庆地区军事代表局
摘要:在科考研究中,面对未知的环境,科考人员也很难识别探究过程中的危险,面临着很多潜在的安全隐患。鉴于此,为了确保科学探测的精准性,准确识别目标物体的距离、尺寸等参数,并有效解决传统二维成像在实际工作中的弊端,为后续工作提供准确的数据支撑,单点激光测距的扫描成像技术应运而生,形成的3D成像精度更高、数据更加准确、所测内容更加详实。所以,本文就对这一技术进行了深入的研究,旨在将其更好的应用到后续科考研究中。
关键词:激光技术;单点激光测距;扫描成像
就当前工作来看,科学探查工作都是以清晰度较高的摄像机进行目标物体成像的获取,以二维形态为主,这种方法只能帮助其了解未知环境的外观信息,但是,科考探测是一项危险系数极高的工作,科考人员需要对位置环境下的物体信息进行近距离的观察和测量,在这种情况下,只依靠传统的二维成像和2D数据很难满足现代科学发展的需求。鉴于此,激光测距技术逐渐得到了较好的发展,在无接触测量的状态下,可以帮助科考人员获取更加准确的距离信息,基于单点激光测距测量每个测距点的信息,为现代科学勘测和探究提供了有利条件。
1激光扫描系统实验平台
对于物体进行扫描成像的主要器材如图1所示,图(a)为整个系统平台的实物图,测距仪(图(b))需要安装在二轴云台(图(c))上,并且,二者在实际工作中应始终保持在一个垂直线上,具体尺寸如图所示。其中,单点激光测距仪的有效测量距离为200m,测量精度在10cm,二轴云台可实现全方位360°的旋转,角度定位精度为±0.1°。
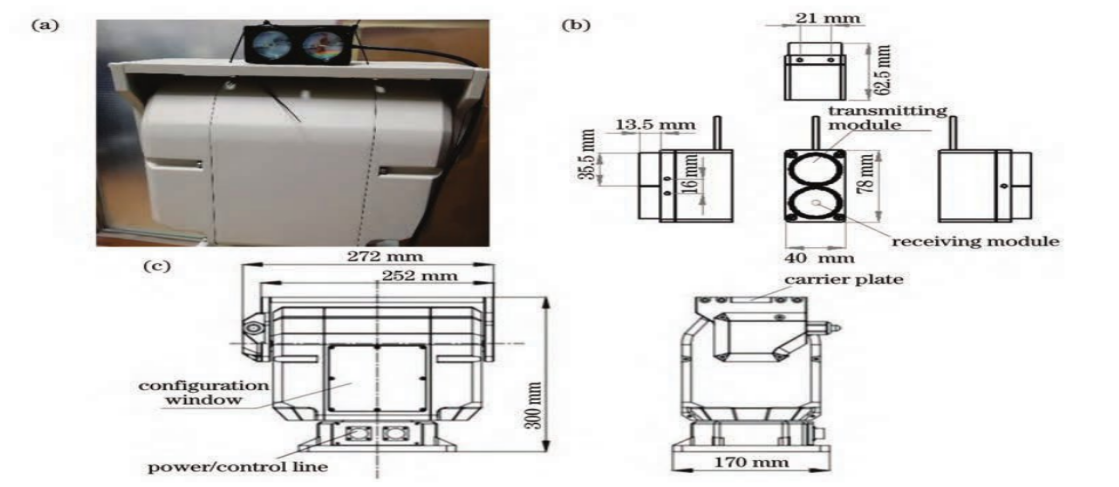
图1 激光扫描系统实验平台
2系统整体设计
在单点激光扫描成像系统中,激光测距仪是最核心的设备,利用测距仪可以对目标物体的距离、形态、尺寸等进行识别,形成三维成像,在二轴云台的辅助下,就可以对相应的距离、尺寸、角度信息进行分析处理,从而形成比较准确的3D坐标。一般情况下,系统通电测距仪就会自动进入到运行状态,精准识别目标物体的信息后再将其上传到相应的主控制器中,由主控制器对获取的数据信息进行筛选整理,将有效的数据及时进行Excel录入保存。之后,主控通过串口向云台发布相应的指令,云台根据最小角度分辨率对定位角度进行进一步的调整,获取点云信息。在激光扫描过程中,必须将系统水平角度和垂直角度的控制重视起来,为了将误差控制在最小范围内,必须对点位进行反复的测距,并做好相应的偏转控制。在此过程中需要注意,激光测距仪和云台的中心应始终在同一垂直线上,通过云台的转动带动测距仪,有序测量点位,并将获取的数据信息及时上传至主控器中。在物体勘测过程中,待扫描完目标范围内的所有点位后,检测工作结束。在进行数据优化工作时,可利用Excel中的数据信息,对其进行归纳整理,构建3D点云图,确保科学勘测的精准性。
3系统定标和点云处理
实际上,最终成像的精度往往是由测距精度和角度定位的精度共同决定的,但是,云台在定位的过程中很容易出现给定角度和实际测量角度存在偏差的情况,此时,就要对系统进行科学定标,由主控制器发出定位角度的控制命令,然后从云台上获取当前角度,在反复对比后发现,给定角度和实际测得的角度存在一个固定的偏差值,水平角度为0.276°,垂直角度为0.402°,此时,就需要对成像角度进行进一步的修整调整。在点云获取上,测距仪读取的距离数据和云台获得的角度数据是球坐标系中的位置P(s,α,β),转化成直角坐标系如图2所示。
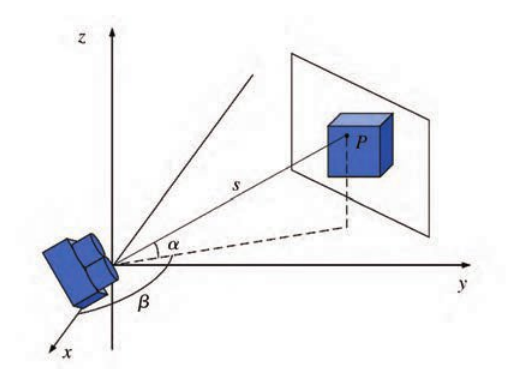
图2 系统获取的3D点云
以光源为坐标原点,测距仪测得的P点和光源之间的距离就是s,垂直方向的偏转角度为α,水平方向的偏转角度为β,从而就能得到3D的坐标点P的坐标(xP,yP,zP),关系式如下:
在进行实际测量时,同一点的距离测量值为s,激光测距仪需要对目标物体反复测量20次,求其方差,最终得出较为精确的数值。如果数据的方差较大,表明数据点的分布比较分散,数值跳跃情况突出,可能会出现较大的偏差,此时就需要反复测量得出相对准确的数值。在进行点云处理时,先不考虑对方差进行过滤,得到大量测得的实际数据,然后通过高斯拟合求得相应数值,作为点位测量的最终结果。
4点云过滤
在进行激光测距的过程中,系统硬件、光照、目标物体的材质等都会对激光测距仪产生一定的影响,导致测量结果与实际情况存在偏差,出现噪点。通常情况下,噪点经常存在于边界或裂缝部位,一般不会对物体原本形态造成影响,所以,在进行点云数据处理时,就可以将具有噪声的基于密度的聚类算法(DBSCAN算法)利用起来,利用其本身的高密度连通性的特性,可以在较短时间内快速识别任何形状的类别。但是,在实际应用这种聚类算法时需要注意,应做好半径值和邻域密度阈值这两个参数的调节工作,其中,半径值主要就是对某一目标物体邻域距离的数值进行测量调节,邻域密度阈值就是某个目标物体的半径值中样本个数的阈值,这两个参数均需要在不断的调整中得出最准确的数值。
本次选取的这种DBSCAN聚类算法,实现了对原始点云数据的有效处理,科学进行聚类操作和噪点过滤,与其他聚类算法相比较,本次所选的聚类算法在簇的数量上没有严格的限制,可以用作非凸数据集,也可以对相对离散的点位进行过滤处理,需要调节的参数比较少,聚类效果也更加理想,最终呈现出来的数据和成像更加准确。
5结论
总而言之,随着科学探究的不断深入,传统的二维成像技术已经无法满足科考工作的实际需求,一些目标物体的具体距离、形态等都无法获取。鉴于这种情况,当前非常有必要在测距扫描成像技术上进行进一步的改进,充分利用当前科技发展的优势,将各种先进的信息技术手段利用起来。因此,本文就对基于单点激光测距的扫描成像技术进行了深入的研究,构建一个单点激光测距和二轴云台相结合的3D成像系统,利用云台进行三维成像的获取,通过DBSCAN聚类算法对测量的点云数据进行处理和过滤,在科学处理手段的支撑下,最终形成了清晰度高、精确度强的3D成像,且目标物体的距离、尺寸以及定位角度等误差都能控制在标准范围内,在室外比较复杂的情况下也能进行精准探测,这就为当代的科学探究工作提供了有利条件,科考人员对未知环境也有了更加准确的感知。
参考文献:
何巧莹,黄林海.基于单点激光测距的扫描成像技术[J].激光与光电子学进展,2021,58(06):355-362.
陈念年,张佳成,范勇,卢蓉.一种高精度单点激光三角测距方法[J].计算机测量与控制,2010,18(05):984-986.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



