中国民用航空飞行学院 空中交通管理学院 618307
摘 要:民航ADS-B作为协作相关监视系统,具有有开发与维护费用少,定位精度好,数据刷新率快等优势,在各民航单位以及学校广泛应用。但其获取位置信息的来源过于依赖GPS,若GPS受扰,将大幅降低ADS-B发出的位置信息精度,导致席位终端出现航空器偏航现象。本文对GPS受扰原理及其如何影响ADS-B系统水平位置数据的完好性和精度判别值NUCp进行分析。
关 键 词:广播式自动相关监视;GPS干扰;导航位置不确定类别;
1 引言
广播式自动相关监视(Automatic Dependent SurveillanceBroadcast,ADS-B)系统,拥有着低成本的基础设施建设需求(其费用为传统二次监视雷达的十分之一,建成一部二次雷达的需要设备成本约680万人民币~2700万人民币,而一套ADS-B地面站建设成本约68万人民币~270万人民币)、相比之下,ADS-B具有维修难度更低、定位精确度可提升至十米量级,监视数据刷新速率也可超过一秒一次等的优势。在我国“十三五”民航建设的末期,我国全部的航路、机场、终端区已铺设ADS-B设备,并具有使用能力。但由于GPS信号传播原理,其在地面的信号极易受到干扰,从而致使ADS-B的信号质量降低。本文将通过对GPS干扰原理及其影响ADS-B系统水平位置数据的完好性和精度判别值NUCp进行分析。
2 GPS干扰分析
对GPS系统的干扰有压制式干扰和欺骗式干扰两种类型,两种干扰均可是接收机无法正常解调信号。其中压制式干扰是通过干扰机发射高强度的调频噪声或者调制的伪随机序列,使GPS接收机天线混淆GPS微弱信号和干扰信号,从而使其无法实现位置的解算;欺骗式干扰通过某种技术手段使GPS接收机天线捕获虚假的GPS信号,从而输出虚假的位置信息。
欺骗式干扰通常使用场景为导航战或导航对抗中,本文主要对GPS压制式干扰进行分析。
2.1 GPS压制式干扰
压制式干扰通过使用信号发射机发出调频噪声或者调制的伪随机序列,来达到使目标导航接收机丢失捕获卫星信号能力的目的,从而干扰目标导航接收机进行定位。从频谱上进行分析,在L1、L2的频带上,越是接近中心频率,能量越集中,所以干扰信号集中在载频周围的危害较大。C/A码抗干扰裕度为32dB,P码为45dB,且P码经过加密且周期长,不易被干扰。压制式甘荣通常作用于C/A码,民用C/A码位于频带中心位置,如果干扰源极限接近单音干扰且频率位于频带中心(1575.42MHz)左右,对C/A测距码的危害性到达最高,但最容易消除。故干扰方一般会发出,较大强度的宽带多音干扰,从而大大降低目标接收机的信噪比,从而无法对信号进行解调。
2.2 GPS信号易受扰原因分析
GPS卫星围绕地球分布在六个不同的平面上,其距离据地球表面平均2 0200km,长距离的传输会导致卫星定位信号强度剧烈衰减,传输到地面时GPS卫星定位信号功率已经微乎其微。下面设例计算到达地面的卫星信号强度,以分析信号易受扰原因,无线电空间传输能量损耗计算公式为:
![]() (1)
(1)
其中F为卫星发射机发出的信号频率,D为传输距离。设D=20200km,F=1575.42MHz,则调制波信号衰减为L(dB)=182.4 dB。
根据目前了解GPS系统的技术要求,GPS卫星发射的测距码信号到达地面的强度为 ![]() , GPS卫星发射初始位置信号的有效通量密度(Y=56.8dBm)减去信号通过大气层后衰减功率(假设X=3.0 dB)再减去L,则GPS卫星发射的测距码信号到达地面的强度
, GPS卫星发射初始位置信号的有效通量密度(Y=56.8dBm)减去信号通过大气层后衰减功率(假设X=3.0 dB)再减去L,则GPS卫星发射的测距码信号到达地面的强度![]() 为:
为:
![]() (2)
(2)
地面GPS信号强度差的特性导致了GPS信号更易受到影响。据相关实验表明,当设置干扰机在波段1575.42MHz附近发出调制噪声,当调制噪声功率仅仅为1W时,就可以使以其为圆心20多公里范围内的接收机无法正常工作。
2.3 常见GPS干扰源
从以往GPS信号接收机收到干扰,无法捕获卫星导航定位信号得案例来看,GPS接收机受到干扰的位置一般离机场较近,且在公路的主干道沿线上。我国交管部门,为了加强对大中型货运客车的管控力量,对每一种货运客车都安装GPS定位装置,以防止司机超速或疲劳驾驶等,但个别不遵守交通规则的司机在车辆上安装GPS干扰器,是定位设备无法识别到他,从而逃避监控,隐蔽车辆信息。此类干扰器通常为功率只有个位数的小功率产品(如图1所示),司机在网上购买后直接在车载电源上即可连接,因此只有在车辆运行时,才会激活,增加了交管部门排查工作的难度。但上文说到,即便是只有1W的信号也能对GPS接收进行干扰,因此机场中正在进近的低空飞行航空器极易受到干扰器的影响,从而导致GPS干扰事件的发生。

图1 排查中拆除的GPS干扰器
3 GPS受扰影响ADS-B系统方式
3.1 ADS-B系统信息来源
机载ADS-B信息系统是兼顾着通信与监视两种职能,它由三个子系统组成,其中有信息来源部分、信息传输的介质、信息处理以及最终的显示中心。ADS-B信息来源主要包括航空器的4D位置信息(经度、纬度、飞行高度以及飞行时间),和其他可能附加的信息(航空器驾驶员输入信息、航线拐角、航迹角冲突、告警值等)以及航空器的识别信息和航空器类型信息。这些信息的来源为机载的电子设备:①全球卫星导航系统;②飞行管理系统;③惯性基准系统;④惯性导航系统;⑤以及其他机载传感器系统。
ADS-B系统通常以Asterix Cat021格式将报文送至空管中心,自动化系统将ADS-B和二次雷达数据相融合后,提交给管制员以供使用。而报文内容中,对目标的定位信息,以及该信息的质量判别均来源于GPS。若接到的卫星位置信号偏差过大或者定位位置完全错误,与二次雷达所提供的位置大相径庭,自动化系统将分裂目标,是管制员终端上出现两个目标,干扰管制工作进行。
3.2 位置信息判定因子
GPS在全球得到大范围的应用,其完好性、可靠性、导航精度一直作为评定其导航系统性能的参数。GPS进行导航时,它发出定位信号的完好性和精度评定参数为:水平保护门限(Horizontal Protection Level, HPL)和水平位置质量因子(Horizontal Figure of Merit, HFOM)。其中HPL定义为设特定的半径,以GPS定位位置为圆心画圆,可保证在特定概率下(通常定义最大漏检概率为10-7) 航空器在显示系统中的真实位置一定在该圆中。而HFOM定义为设特定的半径,以GPS定位位置为圆心画圆,可保证在特定概率下(通常为95%) 航空器在显示系统中的真实位置一定在该圆中[4]。
两个参数的定义相仿,又在功能与阈值上有差别,从HPL可以得出航空器与航空器之间的飞行间隔,另一个数值水平告警门限(Horizontal Alarm Limit, HAL)也有同样的职能,但与HAL不同的是,HPL还可以判断接收机是否已经启用接收机自主完整性检测(Receiver autonomous integrity monitoring,RAIM)。HFOM的圆半径更小,当航空器与航空器之间的实际位置距离已经小于或等于HFOM时,二者可能已经发生了事故。HPL和 HFOM在航空器的位置表示如图2所示,由图中可见,即HFOM对航空器位置误差要求更加严格,且当导航位置信息满足HFOM门限时,一定同时满足HPL门限要求。
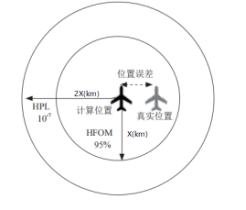
图2 HPL和HFOM定义图解
3.3 导航位置不确定类别
RTCA DO260文件中压缩了对水平位置信息在导航电文中的占用比例,通过定义导航位置不确定类别(Navigation Uncertain Category for position,NUCp) 来对ADS-B的定位信息的质量进行参数上的转换。虽然之后又发布了DO260A 和 DO260B 两个文件,它们中导航完整性类别(Navigation Integrity Category, NIC)、监视完好性水平(Surveillance Integrity Level, SIL)及导航精度类别(Navigation Accuracy Category, NAC)这三个参数能够更高精度地对位置进行描述、且完好性更高。但是仍然存在着局限性,因为现存的机载ADS-B设备有部分并不能支持这三个参数的精度标准。所以目前仍然使用NUCp值对ADS-B的位置精度进行衡量。其对应关系如表1所示,表中:Rc为水平包容半径;EPU 为估计位置不确定度,与95%的置信区间中所能达到的水平位置精度相对应[1]。
按《广播式自动相关监视(ADS-B)管制运行规程》中规定标准,当ADS-B系统报文中 NUCp值≥ 5时,可判定ADS-B提供的位置信号质量正常,可与二次雷达融合交由管制员使用。如果NUCp< 5,若管制员终端出现了ADS-B的位置报告,应有标志提示管制员该位置信号存在问题,或直接在终端上不显示该信号,本次ADS-B信号应当废弃不参加位置融合。
表1 NUCp 编码标准
NUCp | HPL(10-7)/km | HFOM(95%)/km |
0 | Unknown | Unknown |
1 | Rc<37.040 | EPU<18.520 |
2 | Rc<18.520 | EPU<9.260 |
3 | Rc<3.704 | EPU<1.852 |
4 | Rc<1.852 | EPU<0.965 |
5 | Rc<0.965 | EPU<0.463 |
6 | Rc<0.370 | EPU<0.185 |
7 | Rc<0.185 | EPU<0.093 |
8 | To be discussed | EPU<0.010 |
9 | To be discussed | EPU<0.003 |
... | To be discussed | To be discussed |
4总结
本文通过分析GPS信号经长距离传输后到达地面的信号强度很低,受到干扰后HPL和HFOM的精度大幅度降低,导致ADS-B系统中由它们编码的NUCp值受到干扰,从而使ADS-B系统无法正确地提供位置信息。为今后解决GPS干扰对民航ADS-B系统影响问题提供理论支持。
参考文献:
[1]沈笑云,唐鹏,张思远,焦卫东.ADS-B统计数据的位置导航不确定类别质量分析[J].航空学报,2015,36(09):3128-3136.
[2]易振宁.航班受GPS干扰导致ADS-B地面站输出位置异常现象研究[J].现代信息科技,2021,5(13):45-50.DOI:10.19850/j.cnki.2096-4706.2021.13.012.
[3]中国民用航空局 .关于下发《广播式自动相关监视(ADS-B)管制运行规程》的通知 . (2011-11-23)
[4]易振宁.航班受GPS干扰导致ADS-B地面站输出位置异常现象研究[J].现代信息科技,2021,5(13):45-50.DOI:10.19850/j.cnki.2096-4706.2021.13.012.
项目资助:民航飞行技术与飞行安全重点实验室开放项目资助(FZ2021KF07)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



