(中国民用航空飞行学院绵阳分院)
加拿大TRU公司的C172模拟训练器凭借其优秀的性能,在中国通航训练器中占有较大的份额。该型模拟训练器的操控系统能体现真实反映飞机的飞行状态,精确的模拟飞机训练的教学过程。受到飞行员的好评。该系统的运行状态决定了飞行模拟训练的好坏。故该操控系研究统的研究迫在眉睫。
模拟训练器操控系统模拟飞机操纵原理
飞机操控系统由操纵机构、MCL控制系统两部分组成。其中操纵机构在飞机座舱内,连接系统将操纵机构和飞机外用于控制飞机姿态的电机、控制系统、位移传感器以及提供力感模拟的力传感器等连接在一起。飞行员通过操纵飞机座舱内的操纵装置,将相应的操纵信息通过控制系统传送给控制盒、调整片等,实现舵面的偏转,从而控制飞行姿态。由于飞行模拟机需要操纵装置外形和力感的逼真模拟,因此模拟座舱内的操纵装置和连接系统的一部分等保留,而座舱外面的机构和控制系统等采用力传感器及位移传感器和电机等加载机构实现。整个系统的结构如图-1 所示。
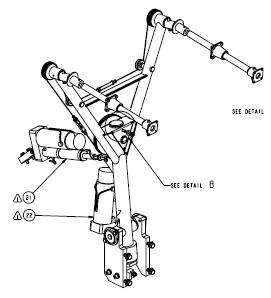
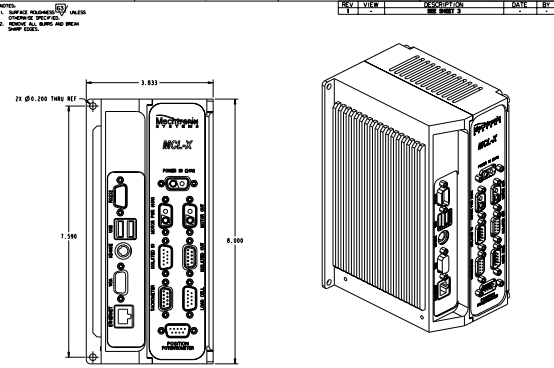
图-1操控系统结构图
1.MCL控制盒
MCL控制盒是TRU公司独立研发拥有自主知识产权关键设备。它通过检测控
制卡把传感器接收到的信息通过计算,检测出驾驶杆运动的位置,旋转角度、偏转角度和拉伸角度;检测出各种姿态下反馈到操纵杆上的真实力度变化。并
传递给主计算机,引导视景系统和声音系统做出相对应的反映。控制盒还引导运动电机给操纵杆上对应状态的力量补偿。
2操纵机构
操纵载荷系统是由电机、作动筒位 (含移传感器)以及力传感器组成的。
2 .1测力传感器
.1测力传感器
OMEGA工业测量的LC201-300压缩称重传感器
张力/压缩
张力校准
0-25 lb至0-300 lb
0-100至0-500 N
激励: 10 Vdc,最大值为15 Vdc
2.2运动同步电机
DYNETIC SYSTEMS公司DC48V电机,系统把测力传感器反馈给MCL控制盒的电信号进行计算,使电机带动作动筒向相反的方向运动,在学员操纵驾驶杆运动时感觉到阻力。使之与真实飞机感觉一致。
2.3作动筒
由TRU公司设计的由电机推杆和位移传感器组成的精密组件。电机推杆移动控制驾驶杆的移动范围和操控姿态。位移传感器,通过单位时间的位置变化引起单位时间的电信号变化。并将这些信号传送给MCL控制盒处理。最终转化成旋转角度、偏转角度和拉伸角度三个姿态信息反应到模拟机仪表上和视景图像。逼真的模拟出飞机的运动态势。
3操控系统的故障检测与预防
3.1物理结构的检测与预防
C172模拟训练器的操控系统包含大量机械传动结构。金属疲劳,耦件磨损必不可少。我们在维护工作中要定期对设备关节部位进行润滑来防止磨损,定期坚固螺栓防止设备松动。检查部件外形是否完好,发现裂纹就要及更换。
3.2测力传感器的检测
先关闭HOST主机运行的仿真模型,在 IOS桌面上运行TRU公司专用维护软关于Control Loading的“HOST EMULATOR”程序,选择“MODE selection——fix”操纵杆会在电机作用下固定不动,用一个较大的力推拉操纵杆。软件上力与时间的曲线会出现波动。
3.3作动筒的检测
关闭电源轻轻推拉操纵杆,作动筒推杆能否自由移动同时检测位移传感器的电阻是否在0-4800欧间线性变化。
3.4 伺服电机的检测
先关闭HOST主机运行的仿真模型,在 IOS桌面上运行TRU公司专用维护软关于Control Loading的“HOST EMULATOR”程序。查看主计算机能否找到电机。关闭电源,取下电机测量电机阻值是否接近0.
3.5MCL控制盒检测
先关闭HOST主机运行的仿真模型,在 IOS桌面上运行TRU公司专用维护软关于Control Loading的“HOST EMULATOR”程序。Ping主计算机与MCL控制盒是否通信正常,读取“data”中的数值,看参数是否正常。
4设备更换后的校准
模拟训练器的操控系在更换了设备后必须进行校准,因为新设备的性能参数不可能与原设备一致。只有对现有系统的力、位置和增益进行校准,才能使操控系统能体现真实反映飞机的飞行状态,精确的模拟飞机训练的教学过程。
4.1力的校准
力的矫正:以用于拉动驾驶杆较顺畅,不费力为好;选择“MODE selection——free”,适当调整“data——force offset”中的数值,以达到校准。
4.2位置较准
以“graphics”中的线与水平零位线重合为好。
选择“Mode selection——normal”,设“airspeed”为“105”,观察“Actual position vs time”即期望值线与“Desired position vs time”即实际值线是否重合或接近重合;若相差较大,适当修改“data-----position offset”中数值使之接近;若重合则为校准好;若有较小差距,则从图中得出期望值与实际值之间的差数,然后在升降舵配置文件中(ftp:192.168.150/use/Ascent/ mcl-x/exe/data/elevator.cfg)修改相应数值并保存。
4.3 kvff(增益)校准
以“graphice”中的水平为好,选择“Mode selection-----position sine wave”,在“grapnice”中选择“position Err vs position”,观察线是否水平,适当调整“data----kvff”数值,使之水平。保存,退出。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



